中小学STEAM教育:在中小学阶段,STEAM(科学、技术、工程、艺术、数学)教育愈发受到重视。四足机器狗和人形机器人是极佳的教学工具,它融合了机械设计、电子电路、传感器技术、编程算法等多学科知识。
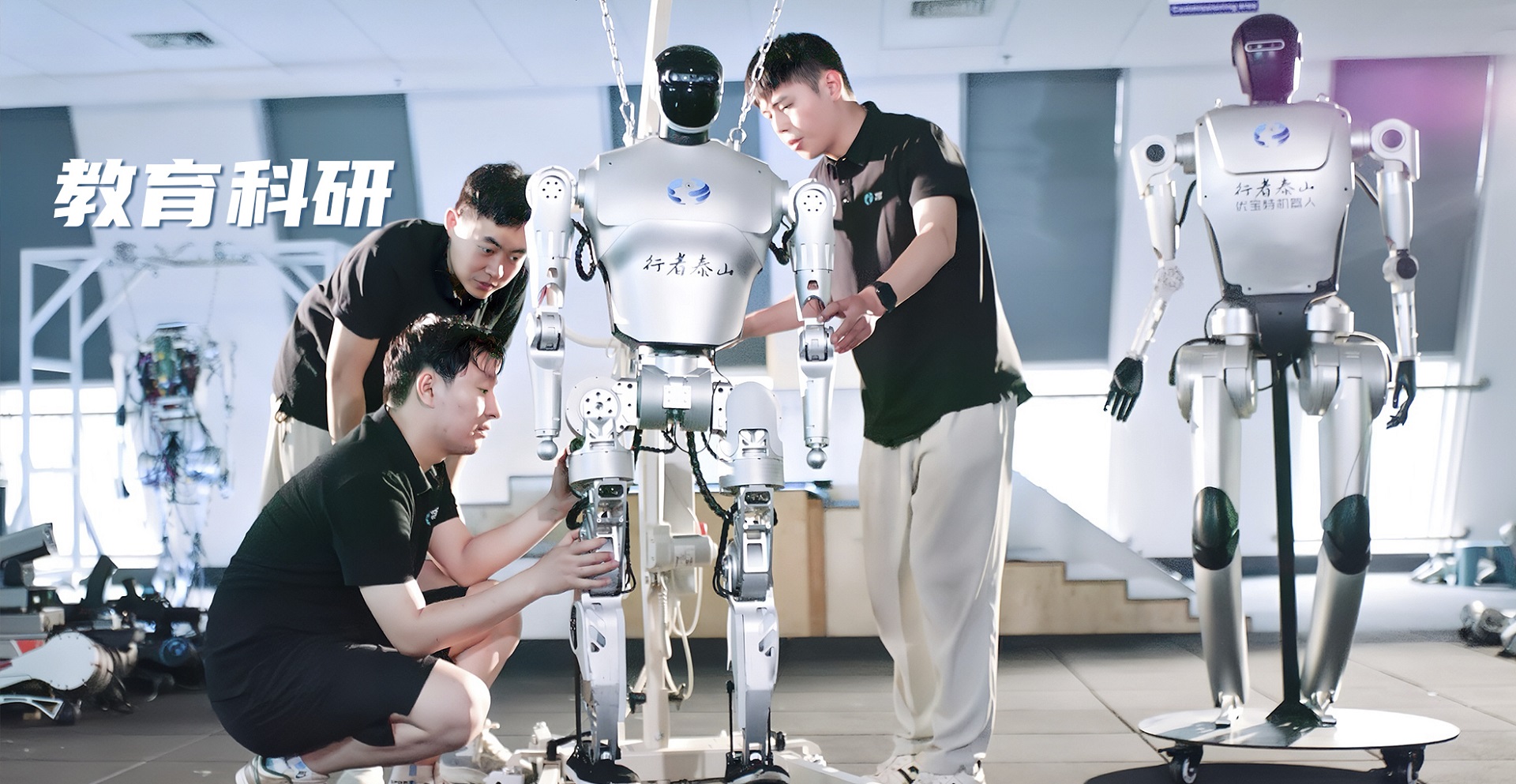
高校科研与专业教学:在高校的机器人工程、自动化、控制科学与工程等相关专业,四足机器狗和人形机器人可作为科研平台进行二次开发,如开发更先进的运动控制算法、提高机器狗的环境感知和决策能力等。
机器人维护与维修专业:对于职业院校开设的机器人维护与维修专业,四足机器狗和人形机器人是理想的教学设备,为将来从事相关职业打下坚实的技能基础。
人工智能与编程培训:在职业技能培训领域,人工智能和编程是热门课程。四足机器狗和人形机器人为培训提供了实际应用场景。

对于职业院校开设的机器人维护与维修专业,四足机器狗和人形机器人是理想的教学设备,为将来从事相关职业打下坚实的技能基础。
在职业技能培调领域,人工智能和编程是热门课程。四足机器狗和人形机器人为培训提供了实际应用场景。
三位一体深度教育解决方案,我们不止卖设备,而是提供“硬件平台+课程体系+产教服务”结合的完整方案,覆盖产业融合、教学全流程与未来能力培养。
硬件体系覆盖从基础到前沿的培养路径:四足机器人E-DOG:高性价比教学/竞我平台,适配教育部白名单我事,课赛街接易落地;四足机器人E15:科研/开发旗舰平台,支持高动态运动、全接口开放,适配工业场景与毕业设计;人形机器人E1:具身智能终极平台,开放全栈开发框架,覆盖从技术研发到商业落地的闭环。
硬件体系覆盖从基础到前沿的培养路径:四足机器人E-DOG:高性价比教学/竞赛平台,适配教育部白名单赛事,课赛衔接易落地;四足机器人E15:科研/开发旗舰平台,支持高动态运动、全接口开放,适配工业场景与毕业设计;人形机器人E1:具身智能终极平台,开放全栈开发框架,覆盖从技术研发到商业落地的闭环。
校企双元育人:引入产业案例+企业导师,教学内容同步前沿技术;实验室全流程支持:含空间规划、师资培训等,共建高水平教学团队;课-证-赛-研贯通:对接职业技能标准,赛项转化为教学案例,支持师生科研反哺教学。
优宝特机器人具备大模型赋能的感知、语义理解、自主规划能力,高校可通过设备开展具身智能全栈开发(从算法到硬件控制)的教学,覆盖行业前沿技术方向。
在优宝特机器人的数据训练实战场景中,研发团队聚焦腿足式机器人的复杂作业需求,构建了“虚拟仿真+真实场景迁移”的高效训练体系。
机器人技术是智能制造、智慧医疗、智慧城市等国家战略的核心支撑,机器人产业招聘职位连续数年高速增长,人才缺口超百万,供需比约1:10,就业率达95%以上,薪资领跑理工科。


基于四足机器人移动平台,进行自动导航、视觉循迹、丛林越障等二次开发,通过比赛激励学生自主学习,创新实践。
激发学生兴趣,培养竞技品质、团队协作和技术能力,全方位提升个人能力,追求卓越,突破极限。